Vize-Europameister in der Klasse Mobilität

Der Wahlkurs CJT-Robotics hat vom 25. bis zum 29.4.2018 am RoboCup in Magdeburg teilgenommen. Als German Open waren dies zugleich die Europameisterschaften, für uns in der Liga der Rettungsroboter (Rescue Robot League). Wir sind die erste Schülergruppe, die es jemals in diesen Wettbewerb der Erwachsenen geschafft hat, entsprechend riesigen Respekt hatten wir vor den hochqualifizierten Teams aus verschiedenen europäischen, indischen und türkischen Universitäten. Unser Ziel war nur, mindestens einen Punkt zu ergattern... um schließlich aus dem Teilbereich Mobility sogar als Vize-Europameister hervorzugehen!

Aber der Reihe nach: Ein derart groß angelegtes Unterfangen kann kaum ohne tatkräftige Unterstützung bewältigt werden. Besonderer Dank geht hier an Herrn Prof. Dr. May, Experte für autonome Robotik an der Technischen Hochschule Nürnberg, der die Teilnahme des CJT-Teams nicht nur initiierte und protegierte, sondern den Kurs auch in den wöchentlichen Treffen tatkräftig unterstützte, sowie an das FabLab Nürnberger Land e.V. in Neunkirchen am Sand, das unter anderem leistungsstarke Notebooks zur Verfügung stellte und mit dessen computergesteuerten Maschinen wir uns passgenaue Acryl- oder ABS-Teiler anfertigen konnten.
Recht unbefangen wagten wir uns gleich am ersten Tag des Wettbewerbs als einzige Gruppe an die Hindernisse mit den versetzten Rampen – die wir zur Verblüffung der teilnehmenden Universitäten erfolgreich bestanden! So erwarben sich die Schüler bereits zu Beginn die Anerkennung der internationalen Teilnehmer.

Als erste durch die versetzten Rampen
Insgesamt setzte sich der RoboCup aus zwölf Einzeldurchgängen zusammen, jeweils mit Sensorentests und Rennen im Parcours. Für die Wertung wurden die Rohpunkte dieser beiden Teile multipliziert. Die Piloten hatten ohne Sichtkontakt zu steuern, nur mit dem Bild der eingebauten Kamera auf ihrem Laptop. Dabei mussten sie vorwärts und rückwärts die Fähigkeiten beispielsweise in Bezug auf Geschicklichkeit und Geländegängigkeit beweisen oder Sonderaufgaben erfüllen. Das „Gehirn“ unseres Roboters waren unter anderem zwei Raspberry Pi-Computer.

Links steht unser Pilot in seiner Kabine
Die besten Roboter besaßen Greif- und Kameraarme, mit denen sie sehr geschickt operieren konnten, oder Hard- und Software, die sie autonom arbeiten ließen. Auf ihrem Gebiet deklassierten sie die Konkurrenz weit und wir konnten nur staunend zusehen. Andere agierten so grob, dass sie versehentlich Teile der Arena in Spreißel zerlegten; auch das war ein Erlebnis.

Großartiges Teamwork am Bautisch
Ein Großteil der Teststrecken belastete die Roboter – nicht nur den des CJT-Teams – enorm, sodass zwischen den Einzelwettbewerben fast ständig Reparaturen und weitere Optimierungen anfielen. Teils herrschte dabei extremer Zeitdruck: Bei einem der Durchläufe brach uns sogar das Hinterrad ab – das Gerät musste aber in einer Viertelstunde für den nächsten Test wieder einsatzfähig sein! So drängten sich die Jugendlichen in zwei Reihen um den Roboter:

Überall recht geländegängig
In der ersten schraubten die Mechaniker unter höchster Anspannung, riefen nach Werkzeug und Ersatzteilen, welche die Helfer aus der zweiten Reihe sofort herbeischafften – sie meisterten es schweißgebadet bis zum Start! In dieser Art konnten wir die Arbeit immer auf viele Helfer verteilen: Unsere Leistung haben wir der hervorragenden Teamarbeit der ganzen Gruppe zu verdanken, deren Tätigkeiten sich von der Steuerung des Fahrzeugs über das Programmieren der Software bis hin zur elektromechanischen Arbeit erstrecken. Die Schüler hatten sich da teilweise ganz außergewöhnlich hohe Kompetenzen angeeignet.
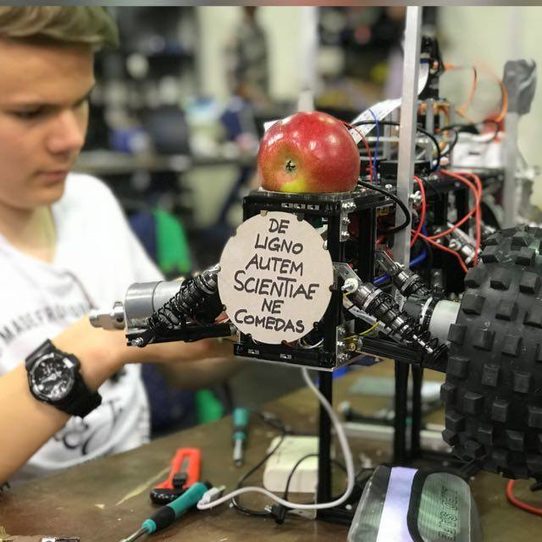
Wir ernten die Frucht der Erkenntnis
Improvisation stand aufgrund der notwendigen Reparaturarbeiten bei allen Teams hoch im Kurs: So fuhr bei unserem Roboter mal ein Apfel mit, um den Schwerpunkt zu korrigieren, mal war der einzig verfügbare Stahlbügel eine umgebaute Gabel vom Frühstück.

Das Zwischenergebnis – kaum zu glauben! Der bis dahin Zweite schied noch aus.
Selbstverständlich konnten wir in der Gesamtwertung mit unseren 213 Punkten nur eine Handvoll anderer Mannschaften übertreffen, doch bei der Mobilität, einem der vier Teilbereiche, sahen wir viel besser aus: Dort qualifizierten sich drei Teams für das Finale. Weil eines leider seinen Kettenantrieb im gefürchteten Stufenfeld zerstörte, wurden wir mit unserem erfolgreichen Durchlauf hinter der wirklich genial konstruierten, hüfthohen Maschine der Ungarn Zweite.

Die Fahrt im Finale durch das Stufenfeld
Kurzum: Es war hochgradig nervenaufreibend und anstrengend, spannend und begeisternd. Eigentlich bieten sich in Magdeburg noch der Dom, das Hundertwasserhaus oder der Jahrtausendturm zum Besuch an, aber tatsächlich war daran nicht im Entferntesten zu denken: Das Licht in den Messehallten wurde erst spät gelöscht und am nächsten Morgen standen die meisten von uns schon früh wieder auf der Matte, so dass viele kaum ausreichend schlafen konnten.

Purer Stress: Reparieren, während die Zeit läuft!
Bemerkenswert war auch die Zusammenarbeit der Teams untereinander: Stets sehr darauf ausgerichtet, sich gegenseitig mit Tipps, Werkzeug und Material zu helfen: Wenn doch mal freie Zeit blieb, erklärten sich die internationalen Teilnehmer die Tricks und Pläne, mit denen sie ihre Roboter erfolgreich machten. Sogar wir konnten die eine oder andere Lösung anbieten. Dementsprechend kehrten wir mit teils phantastischen, teils realistischen Ideen nach Lauf zurück, denn nächstes Jahr gilt es mitsamt der erworbenen Erfahrung noch mehr zu punkten. Die Kehrseite sind allerdings die hohen Kosten für die Bahnfahrt, die Unterkunft und die Teilnahmegebühr, die neben dem umfangreichen Bedarf an Material anfallen. Dieses Jahr wurde das Projekt von der Sparkasse Nürnberg angeschoben und einmalig aus dem Bildungsfonds des Landkreises Nürnberger Land kofinanziert. Aber für nächstes Jahr müssen wir noch Sponsoren finden.


Manuel Riel, Rudolf Pausenberger

Die Logos: CJT, Herz, Roboter
Weiter: Schabernack mit dem Roboter beim Museumsfest (Video)